nonlinear_process¶
-
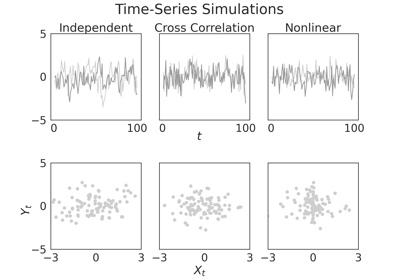
hyppo.tools.nonlinear_process(n, lag=1, phi=1, sigma=1)¶ 2 nonlinearly dependent time series simulation.
\(X_t\) and \(Y_t\) are together a bivariate nonlinear process. Noise follows \(\mathcal{N}(0, \sigma)\). With lag (1), this is
\[\begin{split}\begin{bmatrix} X_t \\ Y_t \end{bmatrix} = \begin{bmatrix} \phi \epsilon_t Y_{t - 1} \\ \eta_t \end{bmatrix}\end{split}\]